Sadržaj
- Što je elektromotor?
- Dizajn električnog motora
- Načelo djelovanja
- Vrste elektromotora
- Opće karakteristike motora
- Okretni moment
- Snaga motora
- Učinkovitost elektromotora
- Nazivni broj okretaja
- Trenutak inercije
- Projektni napon
- Električna vremenska konstanta
- Osnovne formule za izračunavanje snage motora
- Zaključak
U elektromehanici postoji mnogo aktuatora koji rade s konstantnim opterećenjima bez promjene brzine vrtnje. Koriste se u industrijskoj i kućanskoj opremi kao što su ventilatori, kompresori i drugi. Ako su nazivne karakteristike nepoznate, tada se za izračune koristi formula snage elektromotora. Izračuni parametara posebno su relevantni za nove i malo poznate pogone. Troškovi se izvode pomoću posebnih koeficijenata, kao i na temelju akumuliranog iskustva s takvim mehanizmima. Podaci su potrebni za ispravan rad električne instalacije.

Što je elektromotor?
Električni motor je uređaj koji pretvara električnu energiju u mehaničku. Rad većine jedinica ovisi o interakciji magnetskog polja s namotom rotora, što se izražava u njegovoj rotaciji. Djeluju iz istosmjernih ili izmjeničnih izvora napajanja. Baterija, pretvarač ili utičnica mogu djelovati kao opskrbni element. U nekim slučajevima motor radi obrnuto, odnosno pretvara mehaničku energiju u električnu. Takve se instalacije široko koriste u elektranama koje se napajaju protokom zraka ili vode.

Elektromotori su klasificirani prema vrsti napajanja, unutarnjoj strukturi, primjeni i snazi. Također, AC pogoni mogu imati posebne četke. Djeluju na jednofazni, dvofazni ili trofazni napon, hlađeni su zrakom ili tekućinom. Formula snage izmjeničnog motora
P = U x I,
gdje je snaga, napon, amperaža, amperaža.
Pogoni opće namjene sa svojim dimenzijama i karakteristikama nalaze primjenu u industriji. Najveći motori snage više od 100 megavata koriste se u elektranama brodova, kompresorskih i crpnih stanica. Manja veličina koristi se u kućanskim aparatima, poput usisavača ili ventilatora.
Dizajn električnog motora
Pogon uključuje:
- Rotor.
- Stator.
- Ležajevi.
- Zračni razmak.
- Navijanje.
- Prekidač.
Rotor je jedini pokretni dio pogona koji se okreće oko svoje osi. Struja koja prolazi kroz vodiče stvara indukcijski poremećaj u namotu. Nastalo magnetsko polje stupa u interakciju s trajnim magnetima statora, što pokreće osovinu. Izračunavaju se prema formuli snage elektromotora prema struji, za koju se uzimaju učinkovitost i faktor snage, uključujući sve dinamičke karakteristike osovine.

Ležajevi se nalaze na osovini rotora i doprinose njegovoj rotaciji oko svoje osi. Izvana su pričvršćeni na kućište motora. Osovina prolazi kroz njih i izlazi van. Budući da se opterećenje proteže izvan radnog područja ležajeva, naziva se prevjesom.
Stator je fiksni element elektromagnetskog kruga motora. Može uključivati namotavanje ili trajne magnete. Jezgra statora izrađena je od tankih metalnih ploča, koje se nazivaju paketom armature. Namijenjen je smanjenju gubitka energije, što se često događa s čvrstim šipkama.

Zračni razmak - udaljenost između rotora i statora. Učinkovit je mali razmak, jer utječe na nizak radni koeficijent elektromotora. Struja magnetizacije raste s povećanjem veličine zazora. Stoga ga uvijek pokušavaju učiniti minimalnim, ali do razumnih granica. Premala udaljenost dovodi do trenja i labavljenja elemenata za zaključavanje.
Namot se sastoji od bakrene žice sastavljene u jednu zavojnicu. Obično se postavlja oko meke magnetizirane jezgre koja se sastoji od nekoliko slojeva metala. Poremećaj indukcijskog polja događa se u trenutku prolaska struje kroz žice namota. U tom trenutku instalacija prelazi u način konfiguracije s eksplicitnim i implicitnim polovima. U prvom slučaju, magnetsko polje instalacije stvara namot oko vrha stupa. U drugom slučaju, u raspodijeljenom polju raspršuju se utori stupa rotora. Motor sa zaštićenim polovima ima namot koji zadržava magnetske smetnje.
Prekidač se koristi za Prebacivanje ulaznog napona. Sastoji se od kliznih Prstenova smještenih na osovini i međusobno izoliranih. Struja armature primjenjuje se na kontaktne četke rotacijskog komutatora, što dovodi do promjene polariteta i uzrokuje rotaciju rotora od pola do pola. U nedostatku napon motor prestaje vrtjeti. Moderne instalacije opremljene su dodatnim elektroničkim sredstvima koja kontroliraju proces rotacije.

Načelo djelovanja
Prema Arhimedovom zakonu, struja u vodiču stvara magnetsko polje u kojem djeluje sila Aposin1. Ako se od ovog vodiča napravi metalni okvir i postavi ga u polje pod kutom od 90 oceana, tada će rubovi osjetiti sile usmjerene u suprotnom smjeru jedna prema drugoj. Oni stvaraju zakretni moment u odnosu na OS, koji je počinje okretati. Zavoji armature osiguravaju konstantnu torziju. Polje se stvara električnim ili trajnim magnetima. Prva opcija izrađena je u obliku namota zavojnice na čeličnoj jezgri. Dakle, struja okvira stvara indukcijsko polje u namotu elektromagneta koje generira elektromotornu silu.

Razmotrimo detaljnije rad asinkronih motora na primjeru instalacija s faznim rotorom. Takvi strojevi rade na izmjeničnoj struji s frekvencijom rotacije armature koja nije jednaka mreškanju magnetskog polja. Stoga se nazivaju i indukcijskim. Rotor se pokreće interakcijom električne struje u zavojnicama s magnetskim poljem.
Kada u pomoćnom namotu nema napona, uređaj miruje. Čim se na kontaktima statora pojavi električna struja, u prostoru se formira konstantno magnetsko polje s mreškanjem + F i-F. Može se predstaviti kao sljedeća formula:
npr = nobr = f1 × 60 ÷ p = n1
gdje:
npr - broj okretaja koje magnetsko polje napravi u smjeru naprijed, o / min;
nobr - broj okretaja polja u obrnutom smjeru, o / min;
f1 - frekvencija pulsiranja električne struje, Hz;
internet - broj polova;
n1 - ukupni broj okretaja u minuti.
Doživljavajući pulsiranje magnetskog polja, rotor dobiva početno kretanje. Zbog heterogenosti utjecaja protoka, razvit će se okretni moment. Prema zakonu indukcije, elektromotorna sila nastaje u namotu kratkog spoja koji stvara struju. Njegova je frekvencija proporcionalna klizanju rotora. Zbog interakcije električne struje s magnetskim poljem stvara se okretni moment osovine.
Za izračune performansi postoje tri formule snage asinkronog elektromotora. Faznim pomakom koristite
Ama = ama (ama), gdje:
Internet-prividna snaga, mjerena u Volt-amperima.
Internet-aktivna snaga navedena u vatima.
NASA - fazni pomak.
Prividna snaga odnosi se na stvarni pokazatelj, a aktivna snaga na izračunatu.
Vrste elektromotora
Prema izvoru napajanja, pogoni se dijele na pogone koji rade:
- DC.
- AC.
Po princip rada oni se pak dijele na:
- Kolektori.
- Ventil.
- Asinkroni.
- Sinkroni.
Ventilski motori nisu klasificirani kao zasebna klasa, jer je njihov uređaj varijacija pogona kolektora. Njihov dizajn uključuje elektronički pretvarač i senzor položaja rotora. Obično su integrirani zajedno s upravljačkom pločom. Na njihov trošak dolazi do koordinirane komutacije armature.
Sinkroni i asinkroni motori rade isključivo na izmjeničnu struju. Upravljanje prometom odvija se uz pomoć sofisticirane elektronike. Asinkroni se dijele na:
- Trofazni.
- Dvofazni.
- Jednofazni.
Teoretska formula snage trofaznog elektromotora kada se spoji u zvijezdu ili trokut
P = 3 * UF * IF * cos(alpha).
Međutim, za linearne vrijednosti napona i struje izgleda kao
P = 1,73 × UF × IF × cos(alpha).
To će biti pravi pokazatelj koliko snage motor uzima iz mreže.
Sinkroni se dijele na:
- Stepper.
- Hibridni.
- Induktor.
- Histereza.
- Reaktivni.
U svom dizajnu, koračni motori imaju trajne magnete, tako da nisu klasificirani kao zasebna kategorija. Rad mehanizama kontrolira se pomoću frekvencijskih pretvarača. Postoje i univerzalni motori koji rade na istosmjernu i izmjeničnu struju.
Opće karakteristike motora
Svi motori imaju zajedničke parametre koji se koriste u formuli za određivanje snage elektromotora. Na temelju njih možete izračunati svojstva stroja. U različitoj literaturi mogu se različito nazivati, ali znače isto. Popis takvih parametara uključuje:
- Okretni moment.
- Snaga motora.
- Učinkovitost.
- Nazivni broj okretaja.
- Moment tromosti rotora.
- Projektni napon.
- Električna vremenska konstanta.
Gore navedeni parametri potrebni su prije svega za određivanje učinkovitosti električnih instalacija koje rade zbog mehaničke sile motora. Izračunate vrijednosti daju samo grubu predodžbu o stvarnim karakteristikama proizvoda. Međutim, ovi pokazatelji često koriste snagu elektromotora u Formuli. Ona je ta koja određuje učinkovitost strojeva.
Okretni moment
Pojam ima nekoliko sinonima: moment sile, moment motora, okretni moment, okretni moment. Svi se koriste za označavanje jednog pokazatelja, iako s gledišta fizike ti pojmovi nisu uvijek identični.

U svrhu objedinjavanja terminologije razvijeni su standardi koji sve vode u jedinstveni sustav. Stoga se fraza uvijek koristi u tehničkoj dokumentaciji "okretni moment". Predstavlja vektorsku fizičku veličinu koja je jednaka umnošku vektorskih vrijednosti sile i radijusa. Vektor polumjera povlači se od osi rotacije do točke primijenjene sile. S gledišta fizike, razlika između zakretnog momenta i okretnog momenta je točka primjene sile. U prvom slučaju to je unutarnji napor, u drugom-vanjski. Vrijednost se mjeri u Njutn-metrima. Međutim, u Formuli snage elektromotora, okretni moment se koristi kao glavna vrijednost.
Izračunava se kao
AIP = AIP gdje:
Internet-okretni moment, Nm;
IPO-primijenjena sila, IPO;
internet-radijus, m.
Za izračunavanje nazivnog okretnog momenta pogona koristite formulu
Mnom = 30Pnom ÷ pi × nnom, gdje:
Rnom - Nazivna snaga električnog motora, vati;
nnom - nazivni broj okretaja, min-1.
Sukladno tome, formula nazivne snage elektromotora izgleda ovako:
Rnom = Mnom * Internet * nnom / 30.
Obično su sve specifikacije navedene u specifikaciji. Ali događa se da moram raditi s potpuno novim instalacijama, informacije o kojima je vrlo teško pronaći. Za izračun tehničkih parametara takvih uređaja uzimaju se podaci njihovih analoga. Također su uvijek poznate samo nazivne karakteristike koje su date u specifikaciji. Stvarni podaci moraju se izračunati sami.
Snaga motora
U općenitom smislu, ovaj parametar je skalarna fizička veličina koja se izražava u brzini potrošnje ili pretvorbe energije sustava. Pokazuje kakav će posao mehanizam obaviti u određenoj jedinici vremena. U elektrotehnici, karakteristika prikazuje korisnu mehaničku snagu na središnjem vratilu. Da biste označili pokazatelj, koristite slovo asa ili asa. Osnovna mjerna jedinica je VAT. Opća formula za izračunavanje snage elektromotora može se predstaviti kao:
AIP = AIP gdje:
Ipina-mehanički (Korini) rad( energija), J;
internet-utrošeno vrijeme, sek.
Mehanički rad je također skalarna fizička veličina, izražena djelovanjem sile na objekt, a ovisi o smjeru i kretanju tog objekta. To je umnožak vektora sile na putanju:
AIP = AIP gdje:
internet-Prijeđena udaljenost, m.
Izražava udaljenost koju će prevladati točka primijenjene sile. Za rotacijske pokrete izražava se kao:
Ama = ama (ama), gdje:
internet-kut prometa, rad.
Na taj se način može izračunati kutna brzina rotora:
omega = d(teta) ÷ dt.
Iz nje slijedi formula snage elektromotora na osovini: Ainz = Ainzin.
Učinkovitost elektromotora
Učinkovitost je karakteristika koja odražava učinkovitost rada sustavi u pretvorbi energije u mehaničku. Izražava se omjerom korisne energije i potrošene energije. Prema jedinstvenom sustavu mjernih jedinica, označava se kao "eta" i je bezdimenzionalna vrijednost izračunata u postocima. Formula učinkovitosti elektromotora kroz snagu:
eta = P2 ÷ P1, gdje:
P1 - električna (isporučena) snaga, vati;
P2 - korisna (mehanička) snaga, vati;
Također se može izraziti kao:
AIP = AIP 100%, gdje:
Itinerari-nagrađujući poao, J;
Internet-potrošena energija, J.
Češće se koeficijent izračunava formulom potrošnje energije elektromotora, jer je te pokazatelje uvijek lakše izmjeriti.
Smanjenje učinkovitosti elektromotora nastaje zbog:
- Električni gubici. To se događa kao rezultat zagrijavanja vodiča od prolaska struje kroz njih.
- Magnetski gubici. Zbog prekomjerne magnetizacije jezgre pojavljuju se histereza i vrtložne struje, što je važno uzeti u obzir u Formuli snage elektromotora.
- Mehanički gubici. Povezani su s trenjem i ventilacijom.
- Dodatni gubici. Pojavljuju se zbog harmonika magnetskog polja, jer su stator i rotor nazubljeni. U namotu su prisutni i viši harmonici magnetomotorne sile.
Treba napomenuti da je učinkovitost jedna od najvažnijih komponenti formule za izračunavanje snage elektromotora, jer vam omogućuje da dobijete brojke koje su najbliže stvarnosti. U prosjeku se ta brojka kreće od 10% do 99%. Ovisi o strukturnoj strukturi mehanizma.
Nazivni broj okretaja
Drugi ključni pokazatelj elektromehaničkih performansi motora je brzina osovine. Izražava se u broju okretaja u minuti. Često se koristi u Formuli snage motora pumpe kako bi se znale njegove performanse. Ali mora se imati na umu da je pokazatelj uvijek različit za prazan hod i rad pod opterećenjem. Pokazatelj predstavlja fizičku vrijednost jednaku broju punih okretaja u određenom vremenskom razdoblju.
Izračunata formula brzine:
internet = 30, gdje:
internet-broj okretaja motora, o / min.
Da bi se snaga elektromotora pronašla prema formuli okretnosti osovine, potrebno ju je dovesti do izračuna kutne brzine. Stoga će Ainz = Ainzin izgledati ovako:
Aina = apa (2 Apa 60) = apa (apa 9,55), gdje
internet = 60 sekundi.
Trenutak inercije
Ovaj je pokazatelj skalarna fizička veličina koja odražava mjeru inertnosti rotacijskog gibanja oko vlastite osi. Štoviše, masa tijela je vrijednost njegove inertnosti tijekom translacijskog kretanja. Glavna karakteristika parametra izražena je raspodjelom masa tijela, koja je jednaka zbroju umnožaka kvadratne udaljenosti od osi do osnovne točke masama objekta.U Međunarodnom sustavu mjernih jedinica označen je kao kg * m2 i ima izračunava se formulom:
J = ∑ r2 internet, gdje
Internet-trenutak inercije, kg * m2 ;
internet - masa objekta, kg.
Momenti inercije i sile povezani su odnosom:
Ace - Ace, gdje
internet - kutno ubrzanje, s-2.
Pokazatelj se izračunava kao:
epsilon = d(omega) × dt.
Dakle, znajući masu i polumjer rotora, mogu se izračunati parametri performansi mehanizama. Formula snage elektromotora uključuje sve ove karakteristike.
Projektni napon
Naziva se i nominalnim. To je osnovni napon, predstavljen standardnim skupom napona, koji se određuje stupnjem izolacije električne opreme i mreže. U stvarnosti se može razlikovati u različitim točkama opreme, ali ne smije prelaziti najveće dopuštene norme način rada dizajniran za dugotrajno funkcioniranje mehanizama.
Za konvencionalne instalacije nazivni napon podrazumijeva se kao projektne vrijednosti za koje ih programer predviđa u normalnom načinu rada. Popis standardnog mrežnog napona predviđen je u GOST-u. Ti su parametri uvijek opisano u SPECIFIKACIJE mehanizmi. Za izračunavanje performansi koristite formulu snage elektromotora po struji:
P = U × I.
Električna vremenska konstanta
Predstavlja vrijeme, potrebno za dostizanje razine struje do 63 % nakon primjene napona na pogonske namote. Parametar je posljedica prolaznih pojava elektromehaničkih karakteristika, jer su prolazne zbog velikog aktivnog otpora. Opća formula za izračunavanje vremenske konstante:
te = L ÷ R.
Međutim, elektromehanička vremenska konstantam uvijek više elektromagnetskog oceanae. Prvi parametar dobiva se iz jednadžbe dinamičkih karakteristika motora uz zadržavanje stanja kada rotor ubrzava nultom brzinom do maksimalnog broja okretaja u praznom hodu. U ovom slučaju jednadžba ima oblik
M = MSt + Ama (ama(ama) ama), gdje
MSt = 0.
Odavde dobivamo formulu:
M = J × (d(omega) ÷ dt).
U stvari, elektromehanička vremenska konstanta izračunava se početnim momentom-NASAp. Mehanizam koji radi u idealnim uvjetima, s pravocrtnim karakteristikama, imat će formulu:
M = Mp × (1 - omega ÷ omega0), gdje
omega0 - brzina u praznom hodu.
Takvi se izračuni koriste u Formuli snage elektromotora pumpe, kada hod klipa izravno ovisi o okretnosti osovine.
Osnovne formule za izračunavanje snage motora
Da bi se izračunale stvarne karakteristike mehanizama, uvijek se moraju uzeti u obzir mnogi parametri. prije svega trebate znati, koja se struja dovodi do namota elektromotora: istosmjerna ili izmjenična. Princip njihovog rada je različit, stoga se metoda izračuna razlikuje. Ako pojednostavljeni prikaz izračuna pogonske snage izgleda kao:
Pal = Internet, gdje
Je amperaža, a;
Internet-napetost, u;
Pal - isporučena električna snaga. Uto.
U Formuli snage izmjeničnog motora mora se uzeti u obzir i fazni pomak (NASA). Sukladno tome, izračuni za asinkroni pogon izgleda kao:
Pal = U × I × cos(alpha).
Osim aktivne (isporučene) snage, tu je i:
- Itinerari-reaktivni, va. S = P ÷ cos(alpha).
- Itinerari-kompletna, va. Q = I × U × sin(alpha).
U izračunima se također moraju uzeti u obzir gubici topline i indukcije, kao i trenje. Stoga pojednostavljeni model formule za istosmjerni elektromotor izgleda kao:
Pal = Pkrzno + RTP + Rind + RTR, gdje
Rmeh-korisna proizvedena snaga, VT;
RTP-gubici zbog stvaranja topline, VT;
Rhind-troškovi punjenja u indukcijskoj zavojnici, VT;
Rt-gubici uslijed trenja, VT.
Zaključak
Elektromotori se koriste u gotovo svim područjima ljudskog života: u svakodnevnom životu, u proizvodnji. Da biste pravilno koristili pogon, morate znati ne samo njegove nazivne karakteristike, već i stvarne. To će povećati njegovu učinkovitost i smanjiti troškove.
 Zamah u fizici: vrijednost, zamah sile, formula izračuna
Zamah u fizici: vrijednost, zamah sile, formula izračuna Klasifikacija rezača: vrste, opis, primjena
Klasifikacija rezača: vrste, opis, primjena Kamatna stopa središnje banke: značajke, pravila izračuna i zanimljive činjenice
Kamatna stopa središnje banke: značajke, pravila izračuna i zanimljive činjenice Porez na prijevoz na 150 l. S. - formula izračuna i uvjeti plaćanja
Porez na prijevoz na 150 l. S. - formula izračuna i uvjeti plaćanja Black-scholesova formula: definicija, metode istraživanja i primjer izračuna
Black-scholesova formula: definicija, metode istraživanja i primjer izračuna Metoda ostatka: vrste, primjena, formula izračuna
Metoda ostatka: vrste, primjena, formula izračuna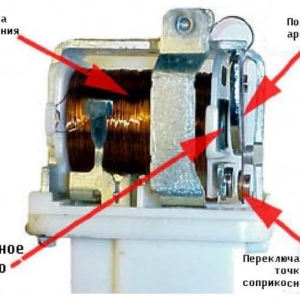 Releji: vrste, klasifikacija, svrha i princip rada
Releji: vrste, klasifikacija, svrha i princip rada Asinkrono programiranje: vrste, klasifikacija, principi programiranja, koncept, značenje i primjena
Asinkrono programiranje: vrste, klasifikacija, principi programiranja, koncept, značenje i primjena Sistematizacija dokumenata: postupak, klasifikacija i pravila
Sistematizacija dokumenata: postupak, klasifikacija i pravila